
AI – an essential tool for control process in food engineering education
AI – an essential tool for control process in food engineering education. Implementation the inquiry based approach method using simulation…

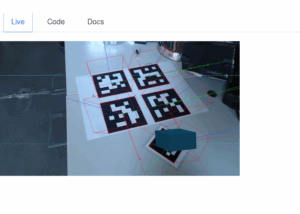
AR Playground
Use Case Make tag detection and AR Technologies more accessible by exposing them in a JavaScript-Based Development Environment. Project consists…

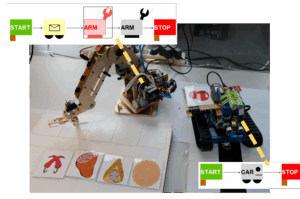
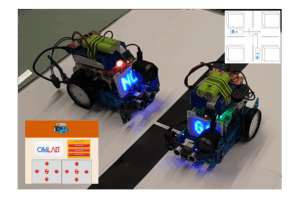
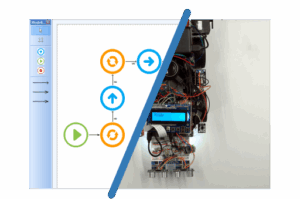
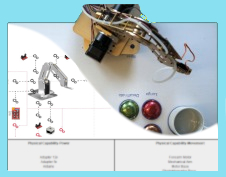
Automation of assembly lines assisted by a robotic arm and a mobile robot
Simulation of assembly line automation using modeling languages. Handling a robotic arm and a mBot
BaggageService
Use Case The overall scenario is about a baggage service for airport customers. The passengers do not have to care…
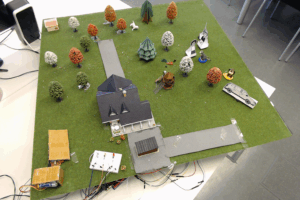
CPS Environment Modelling
Use Case This project is based on the concept of “Smart” models and allows the creation of models that are…
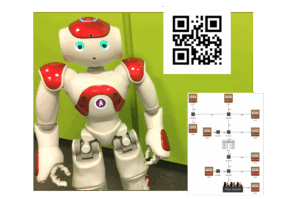
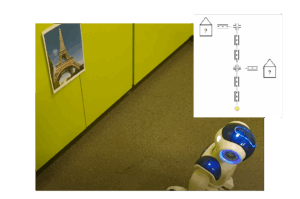
CPS interaction with NAO
Use Case The goal of this project is to support the interaction between a person and a cyber-physical system with…

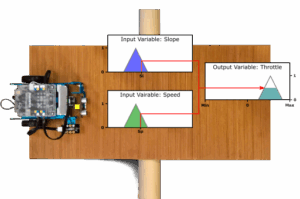
CPS with manual & automatic driving modes
Use Case Our experiment is set in a near-future scenario, where full self-driving is theoretically available, but not necessary. The…
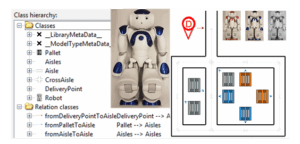
Delivery on Demand in a Cyber Physical System Production Line
Use Case Delivery on Demand in a production line by using a Makeblock Rover and a DOBOT RobotArm managed by…
Design 2 Model Approach
Use Case The aim of the Design 2 Model (D2M) Approach is to support the Design Thinking Process by transforming…

Digital design of food manufacturing processes
Introduction to modeling and simulation using Petri Nets, modelling and simulation of food manufacturing processes, digital design manufacturing processes Digital…
Digital Production Planner Tool
The flexibility of manufacturing processes is one of the major conditions for increasing the competitiveness of the factory of the…
Dynamic Pricing Approach
Use Case Since the rental price of the car should not be the same all the time, we came up…

ENERGY BLOCKCHAIN CONTROL
Use Case Due to the recent advances in household-level renewable electricity generation technology, a new type of market based on…
Environment-monitoring CPS
Use Case The connected Makeblock Me Light Sensor measures the light intensity of the environment, which makes it possible to…
Exception handling
Use Case Errors in the execution of the model can be hard to detect: They can not be detected during…
Exploring Text-Based BPMN 2.0 Modeling at Bielefeld University of Applied Sciences
At the Bielefeld University of Applied Sciences, we are investigating innovative approaches to Business Process Model and Notation (BPMN) 2.0, focusing…
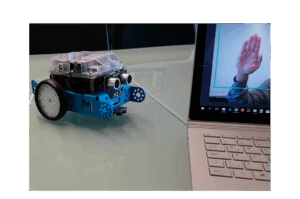
Gesture-based Interaction with Cyber Physical Systems
Use Case This project targets to implement a system that enables to control a cyber-physical-system (CPS) with gestures. The cyber-physical-system…
Image Recognition – Table Soccer
Use Case The aim of the project is to provide a system, which records and streams a table soccer game…
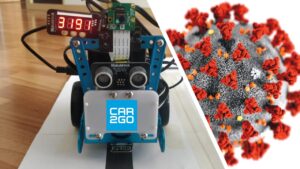
Implementing an Embedded System to Identify Possible COVID19 Suspects Using Thermovision Cameras.
This work was developed under the project financed by Knowledge Transfer Center Hasso Plattner Institute at Lucian Blaga University of…
Intelligent Appointments
Use Case Economic activity in modernity has always been about increasing efficiency, reducing friction in the polycentric machinery, inventing structures…

Intelligent Offering
Use Case The overall use case is to give the passenger the possibility to find the best fitting car for…
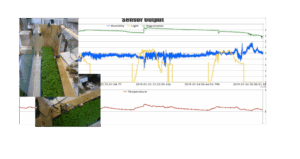
IoT System for Irrigating and Monitoring a Thuja Conifer Nursery
Information The target of this experiment is to improve the sprinkling irrigation process of a Thuja conifer nursery by monitoring…
MBOT Collision Prevention
Use Case The Project is split into three different Use Cases which are: Experiment Use Case 1: The base concept…

mBot Dynamic Pricing (Charging)
Use Case Considering various existing car-sharing services, we see concepts in which both the pricing and the payment process take…
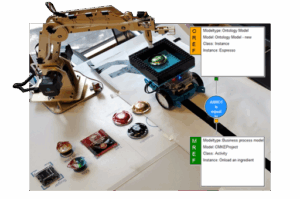
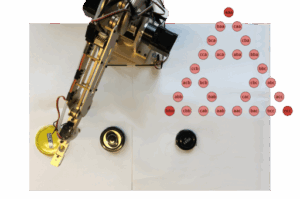
MBot Path Finder
Use Case MBot Path Finder has been developed by using the MBot Rover, the OMiTag Project and the ADOxx modelling interface…

Model-based framework for cyber-physical systems management in OMiLAB
Use Case The aim of the this project is to provide an effective end-to-end solution of the following problem –…
Modelling and Simulation of an Automated System in an Agricultural Warehouse
Information The purpose of this application is to automate the activity in an agricultural warehouse. The assembly consists of a…
OMiLAB Robotic Arm & Car Experiment 1
Use Case Problem Statement The main goal of our project is the simulation of a delivery process in warehouses. For…
OMiLAB Robotic Arm & Car Experiment 4
Use Case This project is designed to enable the user to remotely play the puzzle towers of hanoi by interacting…
OMiLab Robotic Arm 2
Use Case Processes in systems of interacting components require more knowledge than the knowledge of each individual component. The trend…

OMiLAB Robotic Arm Experiment 2
Use Case Use Case Description The goal of this project is to create a method which makes it possible to…
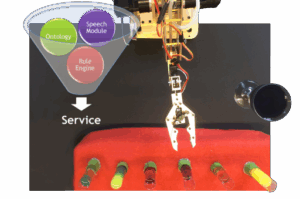
OMiLAB Robotic Arm Experiment 3
Use Case Scenario Mixing a cocktail with a Dobot arm by receiving speech input and subsequently incorporating the required ingredients.…
OMiLAB Robotic Car Experiment 1
Use Case Use Case Description: Performing a Slalom The makeblock robot car called mbot should follow a black line on…
OMiLAB Robotic Car Experiment 2
Use Case To enable autonomous movement of robots, knowledge about its environment is necessary in order to coordinate appropriate movements.…

OMiLAB Robotic Car Experiment 3
Use Case The aim of this project is to provide an universal solution for a self-parking mechanism with autonomous parking place…
OMiLab Robotic Car PoC 1
Use Case (Karagiannis and Kühn, 2002) Capturing the relevant characteristics of a system with domain-specific (or even case-specific) precision benefits…
OMiLab Robotic Car PoC 2
Use Case Sensor fusion integrates information from different sensors. In the fusion process, information is produced that is not inherent…
OMiLAB Robotic Spider Experiment 1
Use Case The use case is to create SVG image data and convert it into a drawing using the mSpider…
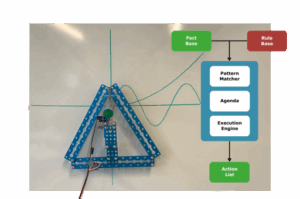
Parking of a mobile robot using modeling languages
Information Creating a Hardware-Software application for: Streamlining traffic especially at peak hours, Reducing search time for a parking space, Reducing…
Personalized Routing and Dynamic Pricing
Use Case The concept of personal routing attempts to deal with a problem which, in today’s world, has so far…
Priority queue
Use Case Car sharing services are very common nowadays and are being operated in various cities around the world. In order…
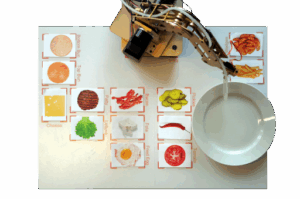
Robotic Order Preparation
Use Case A lot of processes are happening in an online grocery store. Some of them could be partly or…

Robotic Process Automation – possibilities of practical applications
This experiment was developed as part of the EU project Digital Design Skills for Factories of the Future (DigiFoF). The…

Scene2Model Extension
Use Case This project is an extension of the Scene2Model modelling tool. The aim of this project is to automatically provide…

Scene2Model Voice Control
Use Case The goal of this project is to modify a model of the Scene2Model application with speech input. The…
Self-monitoring CPS
Use Case In the chosen use case, the car-sharing provider’s cars can monitor their own state in terms of the…
Semantic Technologies – G5 – Relocation
Use Case The CPS is driving around virtual Vienna, relocating itself between different Point of Interests (POIs). The overall goal…
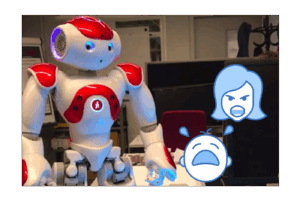
Sentiment analysis with NAO
Use Case In the near future intelligent robot assistants might become reality. Therefore, interactions between humans and computers are becoming…
sIoT Cap2Comp & Comp2Cap
Use Case The aim of this project is to provide new functionalities for the s*IoT methodology. Basically, the idea is…
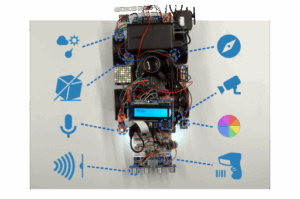
Smart City CPS Integration
Use Case The foundation for most OMiRob cases is the generic framework presented in the picture below. This is also…
Smart Drone Tourist Guide
Use Case Smart Drone Tourist Guide The Smart Drone Tourist Guide is an autonomous drone which can be booked by a…
Smart Garden
Use Case My project is separated in three different location, which are typical for a domestic garden. Each location has…
Smart Package Delivery with ADOxx
Use Case The aim of this project is to develop a modelling method with the ADOxx Metamodelling Platform 1.5 that…
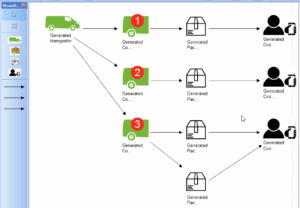
Smart Post – Sending Parcels
Use Case This project simulates the postal parcels sending service, this simulation consists of three use cases: Use Case 1:…
Smart solutions for increasing the quality of plant life
Information The target of this experiment is to create a system of automating the irrigation process, using IoT (Internet of…

Smart Street Lights
Use Case Our use case is related to a new Smart Lighting Infrastructure, to be more adequate for a Traffic…
Smart Tourguide
Use Case The goal of this project is a smart tour guide who goes through a physical world with attractions,…
Smart Urban Farming
Use Case Smart Urban Farming Goal: using models, sensor data and human knowledge (captured in the model) to create an ideal…

Smart-Home Supply Chain
Use Case The smart home supply chain scenario contains multiple use cases. The idea is to enable a smart supply…

Supervising and controlling White Wines Fermentation Parameters Evolution
Configurate a Neural Network and/or a Genetic Algorithm that can simulate the white wine fermentation Information This Web application implements…
XBA_Selbstidentifikation
Use Case Dieses Projekt wird insgesamt von drei Studenten bearbeitet, wobei jeder einen eigenen Bereich selbstständig abarbeitet. Die Idee hinter…
XST iRobot – OMiLAB Robotic Picking and Path Finding Experiment
Use Case The aim of this project is to provide a universal model based solution for automatic route planning and…